
Категории
-
ФАНТАСТИКА
- Фэнтези
- Альтернативная история
- Боевая фантастика
- Космическая фантастика
- Научная фантастика
- Юмористическая фантастика
- Ужасы и Мистика
- Детективная фантастика
- Социально-философская фантастика
- Героическая фантастика
- Эпическая фантастика
- Киберпанк
- Городское фэнтези
- Готический роман
- Ироническая фантастика
- Ироническое фэнтези
- Историческое фэнтези
- Космоопера
- ЛитРПГ
- Мистика
- Ненаучная фантастика
- Попаданцы
- Постапокалипсис
- Сказочная фантастика
- Стимпанк
- Технофэнтези
- Фантастика: прочее
- Юмористическое фэнтези
- ДЕТЕКТИВЫ И БОЕВИКИ
-
ПРОЗА
- Современная проза
- Историческая проза
- Классическая проза
- Советская классическая проза
- Русская классическая проза
- Военная проза
- Контркультура
- Антисоветская литература
- Афоризмы
- Магический реализм
- Новелла
- Повесть
- Проза прочее
- Рассказ
- Роман
- Семейный роман/Семейная сага
- Сентиментальная проза
- Эпистолярная проза
- Эпопея
- Эссе, очерк, этюд, набросок
- ЛЮБОВНЫЕ РОМАНЫ
- ПРИКЛЮЧЕНИЯ
- ДЕТСКИЕ КНИГИ
- ПОЭЗИЯ И ДРАМАТУРГИЯ
-
НАУКА И ОБРАЗОВАНИЕ
- История
- Психология
- Медицина
- Языкознание
- Научно-образовательная: Прочее
- Политика
- Культурология
- Философия
- Технические
- Альтернативная медицина
- Астрономия и Космос
- Биология
- Биофизика
- Биохимия
- Ботаника
- Ветеринария
- Военная история
- Геология и география
- Государство и право
- Детская психология
- Зоология
- Иностранные языки
- Литературоведение
- Математика
- Обществознание
- Органическая химия
- Педагогика
- Психотерапия и консультирование
- Религиоведение
- Рефераты
- Секс и семейная психология
- Учебники
- Физика
- Физическая химия
- Химия
- Шпаргалки
- Экология
- Юриспруденция
- ДОКУМЕНТАЛЬНОЕ
- СПРАВОЧНИКИ
- ЮМОР
- ДОМ И СЕМЬЯ
- РЕЛИГИЯ
-
ДЕЛОВАЯ ЛИТЕРАТУРА
- Маркетинг PR Реклама
- О бизнесе популярно
- Банковское дело
- Бухучет и аудит
- Внешнеэкономическая деятельность
- Деловая литература
- Делопроизводство
- Корпоративная культура
- Личные финансы
- Малый бизнес
- Недвижимость
- Отраслевые издания
- Поиск работы, карьера
- Торговля
- Управление, подбор персонала
- Экономика
- Ценные бумаги, инвестиции
Просмотренные книги
-

Саламандра
Вы — Великий Полоз, Хранитель Золота и единственный наследник Владыки...
-

Музыка судьбы
Известная манекенщица Джулия Макколган на одном из выступлений внезапно...
 58
58 
Два бюро вступили в борьбу за третью ступень космической ракеты.
Двигатель ОКБ-456 получил обозначение РД-109. В его конструкции нашли отражение многие передовые технологии того времени. Для испытаний было изготовлено 12 укороченных и 40 штатных камер сгорания, 7 комплектов турбонасосных агрегатов, 35 комплектов агрегатов автоматики, свыше 20 вариантов смесительных головок.
Огневые испытания начались в 1959 году, при этом отработка запуска двигателя проводилась на стенде, оборудованном специальной барокамерой, которая обеспечивала остаточное давление около 1 мм ртутного столба – то есть практически вакуум. Отработка камеры шла особенно трудно. Так, свыше 80 тестов камер, проведенных при баллонной подаче компонентов топлива, показали, что тяга не поднимается до расчетной. Периодически разлагался «гептил», случались прогары стенок камеры.
К середине 1959 года многие проблемы были решены, а все агрегаты автоматики были подключены к двигателям. Провели еще свыше 70 прожигов продолжительностью до 250 секунд.
Согласно расчетам, РД-109 по сравнению с кислородно-керосиновым двигателем позволял чуть ли не вдвое увеличить массу аппарата, отправляемого к Луне, и на 23 % повысить массу будущего пилотируемого корабля. Однако время неумолимо – Сергей Королёв не мог мириться с затягиванием отработки нового двигателя. РД-109 не «успевал» к первым пускам к Луне, и на третьей ступени «Р-7А» был установлен двигатель разработки бюро Косберга. Главный конструктор пожертвовал эффективностью во имя приоритетов.
Двигатель РО-5 (РД-0105, 8Д714), работающий на привычных компонентах кислород-керосин, был создан и испытан в кратчайшие сроки – всего за девять месяцев! Рекорд объясняется тем, что у Косберга имелись в наличии почти все элементы: рулевая камера от «семерки» и усовершенствованный турбонасосный агрегат, созданный воронежцами. Тем не менее и в этом варианте двигателя для блока «Е» пришлось прибегнуть к необычным техническим решениям. К примеру, Семен Косберг отказался от азота для наддува топливных баков и от перекиси водорода для питания турбогенератора. Вместо азота и перекиси он использовал те же керосин и кислород. Кроме того, отработанный в турбонасосном агрегате газ не выбрасывался просто так, а через систему распределительных дросселей газоводов и рулевых реактивных сопел участвовал в управлении движением блока. Оригинальной была и система камеры сгорания, позволившая уменьшить массу двигателя при повышении качества его работы.

Блок «Е» и межпланетная станция «Е-1» (рисунок А. Шлядинского)
Блок «Е» стартовал с центрального блока «А» в «горячем» режиме – то есть двигатели центрального блока «семерки» в тот момент еще работали. Было понятно, что случайное повреждение центрального блока факелом может привести к непредсказуемым последствиям. Поэтому сверху на блоке «А» установили отражатель с жаростойким покрытием и ферменный переходный отсек.
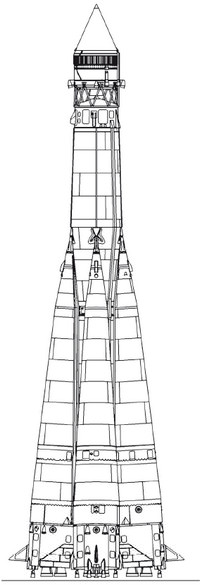
Трехступенчатая ракета-носитель «Лунник» («Мечта», «Восток-Л»). Рисунок А. Шлядинского
Систему управления для блока «Е» разрабатывал Николай Алексеевич Пилюгин. Самой трудной тут была задача «перехвата» управления после отделения от центрального блока. Требовалось не только «выправить» третью ступень, но и надежно управлять ею в течение почти шести минут разгона к Луне и точно выключить по набору скорости. Причем перед этим на активном участке разгона «Р-7А», пока функционируют системы управления всех трех ступеней, нужно сформировать последующую траекторию полета и заложить ее в бортовую систему управления. Этот фронт работ взяли на себя ученые из Математического института имени Стеклова и баллистики НИИ-4, обосновавшиеся в Болшево.
Требовала доделки и система радиоуправления ракет, за которую отвечал Михаил Сергеевич Рязанский. Изначально в НИИ-4 планировали создать отдельные пункты радиоуправления (РУПы) со специальной аппаратурой «Слон». Однако опыт использования НИП-1, который оказался не нужен, фактически дублируя работу ИП-1 Тюра-Тама, показал, что для сокращения сроков и увеличения эффективности проще применять уже существующие РУП-А и РУП-Б полигона, развернутые для радиокоррекции ракет «Р-7».

Станции пункта радиоуправления РУП-А
РУПы располагались симметрично относительно трассы полета ракеты по обе стороны от точки старта на расстоянии 276 км: РУП-А в поселке Тартугай (Чиилийского район Кзыл-Ординской области, Казахстан), РУП-Б в поселке Тогыз (Шелкарский район Актюбинской области, Казахстан). Бортовая аппаратура радиоуправления состояла из восьми бортовых приборов и размещалась в автомобильных «кунгах». На РУП-А вместе с резервными находилось тринадцать автомашин и два павильона пеленгаторных антенн. На «зеркальном» пункте – четыре автомашины.
58